The beginner’s guide to implementing YOLOv3 in TensorFlow 2.0 (part-1)
Tutorial Overview
What is this post about?
Over the past few years in Machine learning, we’ve seen dramatic progress in the field of object detection. Although there are several different models of object detection, in this post, we’re going to discuss specifically one model called “You Only Look Once” or in short YOLO.
Invented by Joseph Redmon, Santosh Divvala, Ross Girshick and Ali Farhadi (2015), YOLO has already 3 different versions so far. But in this post, we’are going to focus on the latest version only, that is YOLOv3. So here, you’ll be discovering how to implement the YOLOv3 algorithm in TensorFlow 2.0 in the simplest way.
For more details about how to install TensorFlow 2.0, you can follow my previous tutorial here.
Who is this tutorial for?
When I got started learning YOLO a few years ago, I found that it was really difficult for me to understand both the concept and implementation. Even though there are tons of blog posts and GitHub repos about it, most of them are presented in complex architectures.
I pushed myself to learn them one after another and it ended me up to debug every single code, step by step, in order to grasp the core of the YOLO concept. Fortunately, I didn’t give up. After spending a lot of time, I finally made it works.
Based on that experience, I tried to make this tutorial easy and useful for many beginners who just got started learning object detection. Without over-complicating things, this tutorial can be a simple explanation of YOLOv3’s implementation in TensorFlow 2.0.
Prerequisites
- Familiar with Python 3
- Understand object detection and Convolutional Neural Networks (CNNs).
- Basic TensorFlow usage.
What will you get after completing this tutorial?
After completing this tutorial, you will understand the principle of YOLOv3 and know how to implement it in TensorFlow 2.0. I believe this tutorial will be useful for a beginner who just got started learning object detection.
This tutorial is broken into 4 parts, they are:
- Part-1, An introduction of the YOLOv3 algorithm.
- Part-2, Parsing the YOLOv3 configuration file and creating the YOLOv3 network.
- Part-3, Converting the YOLOv3 pre-trained weights into the TensorFlow 2.0 weights format.
- Part-4, Encoding bounding boxes and testing this implementation with images and videos.
Now, it’s time to get started on this tutorial with a brief overview of everything that we’ll be seeing in this post.
Exciting news, everyone! I’m absolutely thrilled to announce the completion of my book:
Beginner’s Guide to Multi-Object Tracking with Kalman Filter
Get 25% OFF!
Use coupon code: MIJY159IMW during checkout
Don’t miss out on the chance to become a genuine expert in this field. Grab this practical book now and embark on your journey to mastery!
YOLO: YOLOv3
Initially, for those of you who don’t have a lot of prior experience with this topic, I’m going to do a brief introduction about YOLOv3 and how the algorithm actually works.
As its name suggests, YOLO – You Only Look Once, it applies a single forward pass neural network to the whole image and predicts the bounding boxes and their class probabilities as well. This technique makes YOLO a super-fast real-time object detection algorithm.
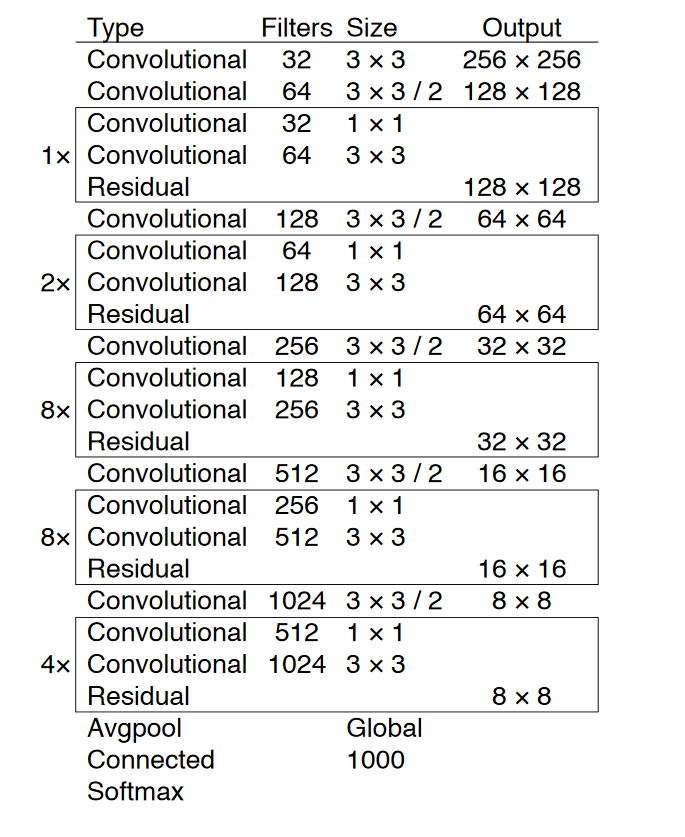
As mentioned in the original paper (the link is provided at the end of this part), YOLOv3 has 53 convolutional layers called Darknet-53 as you can see in the following figure.
How YOLOv3 works?
The YOLOv3 network divides an input image into S x S grid of cells and predicts bounding boxes as well as class probabilities for each grid. Each grid cell is responsible for predicting B bounding boxes and C class probabilities of objects whose centers fall inside the grid cell. Bounding boxes are the regions of interest (ROI) of the candidate objects. The “B” is associated with the number of using anchors. Each bounding box has (5 + C) attributes. The value of “5” is related to 5 bounding box attributes, those are center coordinates (bx, by) and shape (bh, bw) of the bounding box, and one confidence score. The “C” is the number of classes. The confidence score reflects how confidence a box contains an object. The confidence score is in the range of 0 – 1. We’ll be talking this confidence score in more detail in the section Non-Maximum Suppression (NMS).
Since we have S x S grid of cells, after running a single forward pass convolutional neural network to the whole image, YOLOv3 produces a 3-D tensor with the shape of [S, S, B * (5 + C].
The following figure illustrates the basic principle of YOLOv3 where the input image is divided into the 13 x 13 grid of cells (13 x 13 grid of cells is used for the first scale, whereas YOLOv3 actually uses 3 different scales and we're going to discuss it in the section prediction across scale).
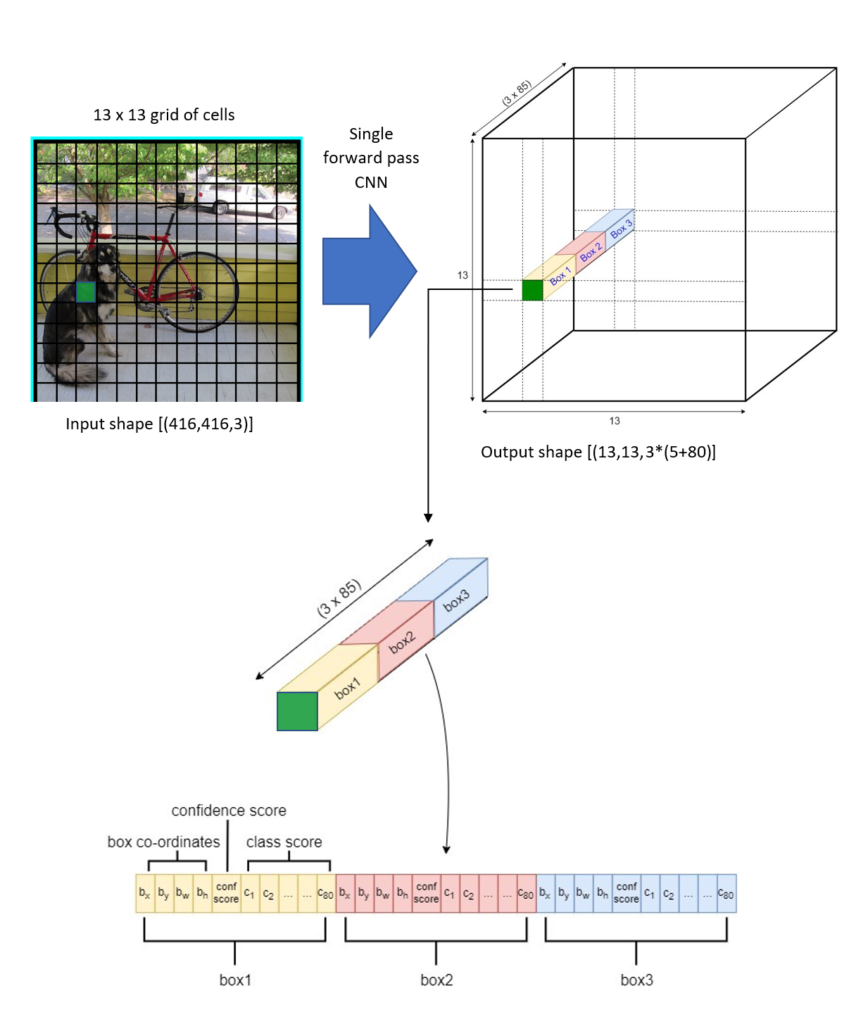
YOLOv3 was trained on the COCO dataset with C=80 and B=3. So, for the first prediction scale, after a single forward pass of CNN, the YOLOv3 outputs a tensor with the shape of [(13, 13, 3 * (5 + 80)].
Anchor Box Algorithm
Basically, one grid cell can detect only one object whose mid-point of the object falls inside the cell, but what about if a grid cell contains more than one mid-point of the objects?. That means there are multiple objects overlapping. In order to overcome this condition, YOLOv3 uses 3 different anchor boxes for every detection scale.
The anchor boxes are a set of pre-defined bounding boxes of a certain height and width that are used to capture the scale and different aspect ratio of specific object classes that we want to detect.
While there are 3 predictions across scale, so the total anchor boxes are 9, they are: (10×13), (16×30), (33×23) for the first scale, (30×61), (62×45), (59×119) for the second scale, and (116×90), (156×198), (373×326) for the third scale.
A clear explanation of the anchor box’s concept can be found in Andrew NG’s video here.
Prediction Across Scale
YOLOv3 makes detection in 3 different scales in order to accommodate different objects size by using strides of 32, 16 and 8. This means, if we feed an input image of size 416 x 416, YOLOv3 will make detection on the scale of 13 x 13, 26 x 26, and 52 x 52.
For the first scale, YOLOv3 downsamples the input image into 13 x 13 and makes a prediction at the 82nd layer. The 1st detection scale yields a 3-D tensor of size 13 x 13 x 255.
After that, YOLOv3 takes the feature map from layer 79 and applies one convolutional layer before upsampling it by a factor of 2 to have a size of 26 x 26. This upsampled feature map is then concatenated with the feature map from layer 61. The concatenated feature map is then subjected to a few more convolutional layers until the 2nd detection scale is performed at layer 94. The second prediction scale produces a 3-D tensor of size 26 x 26 x 255.
The same design is again performed one more time to predict the 3rd scale. The feature map from layer 91 is added one convolutional layer and is then concatenated with a feature map from layer 36. The final prediction layer is done at layer 106 yielding a 3-D tensor of size 52 x 52 x 255.
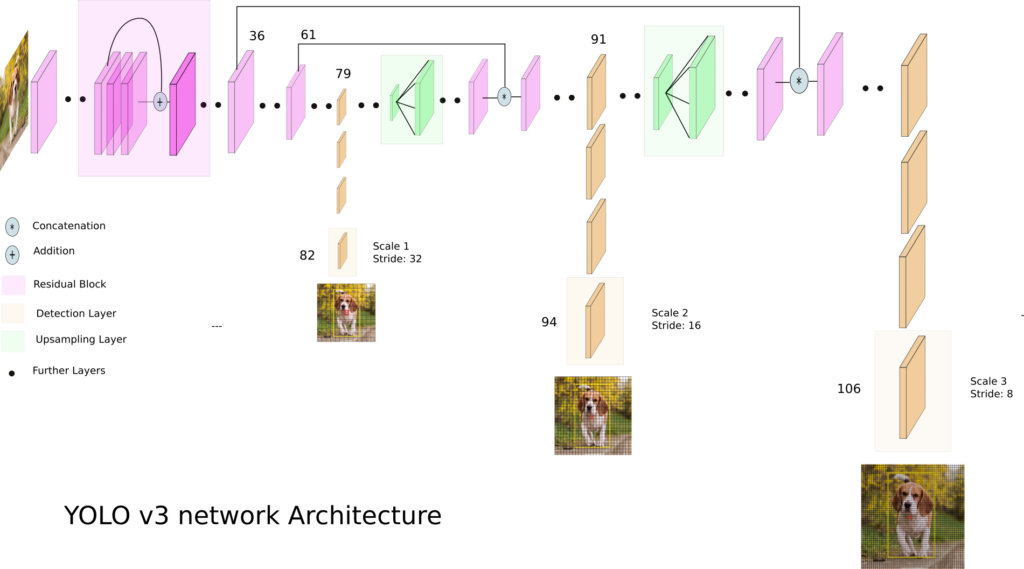
Once again, YOLOv3 predicts over 3 different scales detection, so if we feed an image of size 416x 416, it produces 3 different output shape tensor, 13 x 13 x 255, 26 x 26 x 255, and 52 x 52 x 255.
Bounding box Prediction
For each bounding box, YOLO predicts 4 coordinates, tx, ty, tw, th. The tx and ty are the bounding box’s center coordinate relative to the grid cell whose center falls inside, and the tw and th are the bounding box’s shape, width and height, respectively.
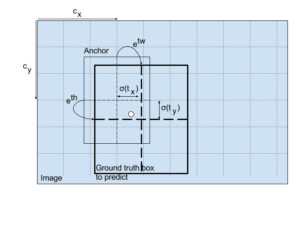
The final output of the bounding box predictions need to be refined based on this formula:
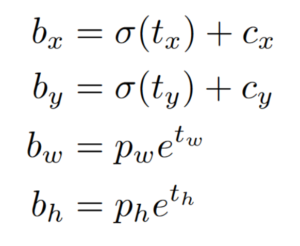
The pw and ph are the anchor’s width and height, respectively. The figure below describes this transformation in more detail.
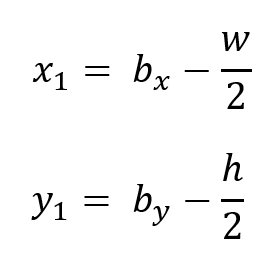
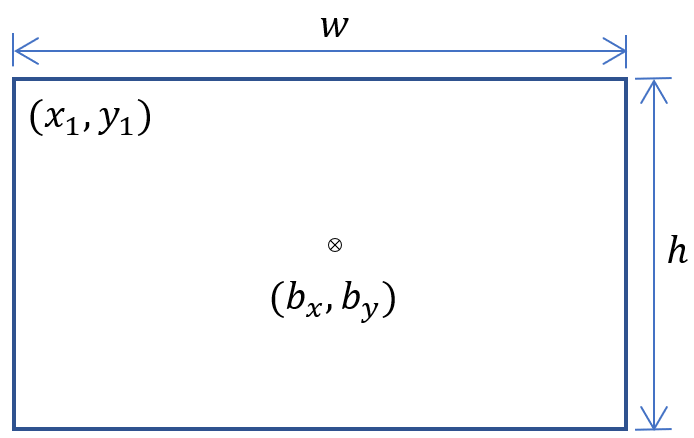
The YOLO algorithm returns bounding boxes in the form of (bx, by, bw, bh). The bx and by are the center coordinates of the boxes and bw and bh are the box shape (width and height). Generally, to draw boxes, we use the top-left coordinate (x1, y1) and the box shape (width and height). To do this just simply convert them using this simple relation:
Total Class Prediction
Using the COCO dataset, YOLOv3 predicts 80 different classes. YOLO outputs bounding boxes and class prediction as well. If we split an image into a 13 x 13 grid of cells and use 3 anchors box, the total output prediction is 13 x 13 x 3 or 169 x 3. However, YOLOv3 uses 3 different prediction scales which splits an image into (13 x 13), (26 x 26) and (52 x 52) grid of cells and with 3 anchors for each scale. So, the total output prediction will be ([(13 x13) + (26×26)+(52×52)] x3) =10,647.
Non-Maximum Suppression
Actually, after single forward pass CNN, what’s going to happen is the YOLO network is trying to suggest multiple bounding boxes for the same detected object. The problem is how do we decide which one of these bounding boxes is the right one.
Fortunately, to overcome this problem, a method called non-maximum suppression (NMS) can be applied. Basically, what NMS does is to clean up these detections. The first step of NMS is to suppress all the predictions boxes where the confidence score is under a certain threshold value. Let’s say the confidence threshold is set to 0.5, so every bounding box where the confidence score is less than or equal to 0.5 will be discarded.
Yet, this method is still not sufficient to choose the proper bounding boxes, because not all unnecessary bounding boxes can be eliminated by this step, so then the second step of NMS is applied. The rest of the higher confidence scores are sorted from the highest to the lowest one, then highlight the bounding box with the highest score as the proper bounding box, and after that find all the other bounding boxes that have a high IOU (intersection over union) with this highlighted box. Let’s say we’ve set the IOU threshold to 0.5, so every bounding box that has IOU greater than 0.5 must be removed because it has a high IOU that corresponds to the same highlighted object. This method allows us to output only one proper bounding box for a detected object. Repeat this process for the remaining bounding boxes and always highlight the highest score as an appropriate bounding box. Do the same step until all bounding boxes are selected properly.
I have another tutorial that I highly recommend reading. It provides detailed instructions on how to load and visualize the COCO dataset using custom code.
End Notes
Here’s a brief summary of what we have covered in this part:
- YOLO applies a single neural network to the whole image and predicts the bounding boxes and class probabilities as well. This makes YOLO a super-fast real-time object detection algorithm.
- YOLO divides an image into SxS grid cells. Every cell is responsible for detecting an object whose center falls inside.
- To overcome the overlapping objects whose centers fall in the same grid cell, YOLOv3 uses anchor boxes.
- To facilitate the prediction across scale, YOLOv3 uses three different numbers of grid cell sizes (13×13), (26×26), and (52×52).
- A Non-Max Suppression is used to eliminate the overlapping boxes and keep only the accurate one.
If I missed something or you have any questions, please don’t hesitate to let me know in the comments section.
After a brief introduction, now it’s time for us to jump into the technical details. So, let’s go get part-2.
Parts
- Part-1, An introduction of the YOLOv3 algorithm
- Part-2, Parsing the YOLOv3 configuration file and creating the YOLOv3 network
- Part-3, Converting the YOLOv3 pre-trained weights into the TensorFlow 2.0 weights format
- Part-4, Encoding bounding boxes and testing this implementation with images and videos
Links to the original YOLO’s papers:
- v1, You Only Look Once: Unified, Real-Time Object Detection https://arxiv.org/pdf/1506.02640.pdf
- v2, YOLO9000: Better, Faster, Stronger https://arxiv.org/pdf/1612.08242.pdf
- v3, YOLOv3: An Incremental Improvement https://pjreddie.com/media/files/papers/YOLOv3.pdf
What others say
Hi,
Great article- Thank you for taking the time to do this.
I like to know more about (cx, cy). I have gone through the GitHub link and understood that they are grid coordinates. Are they coordinate of the center of each grid or are they starting point of the grid? I’m right to say this? In the case of stride 32 and input (416, 416), the grid coordinates will be (0, 0), (0, 32), 0, 64) …..
Your insights on this will be great to understand the concept better.
Thanks,
Thomas.
Hi Thomas,
You’re welcome..
1. Yes, they are grid coordinates and are relative to the stride.
2. They are the starting point of each corresponding grid (top-left corner of the grid), not the center.
3. In the case of 13 x 13 grid cells regardless of its input size, cx and cy are the numbers from 0 to 12.
So, the real grid coordinates will simply follow this rule: (cx*stride, cy*stride).
many many thanks. Great
You’re welcome..
You are the boss, thank you for this !
Hi, Rahmad Sadli,
Excellent work! Simplified clear descriptions!
Hi, Rahmad Sadli,
Excellent work! Simplified clear descriptions!
I am teaching a machine learning course at my school, and would like to consider to use some of your materials here (figures, tables and codes). I may used it in some part of my textbook also. May I know whether this is possible? If yes, what would be the conditions. Also, what type of license is for your online materials?
Thanks again. Best, GR Liu
Hello!
Again, thank you for the tutorial, I believe it’s awesome.
I just have two questions. Isn’t it using the 9 anchors boxes in the 3 escales as opposed to three anchor boxes?? When the block type is “yolo” then block[‘anchors’] is of length 9 and it is used in all the scales. Is that so or am i missing something?
Also I don’t know why but I have passed several videos of different sizes and the best it does is 11 fps. I thought it was supposed to give around 30-45 and I don’t know if my laptop is the bottleneck here or not. Is the algorithm performing well? I’m running on a laptop with a good GPU, an Nvidia RTX2070 maxq and an i9 (MSI prestige P65)
Hi,
#1 We have selected 3 from 9 anchors for each scale. Carefully look at the “mask” parameters (config file).
#2 (My opinion) There are two things that we need to know:
1. The Max-Q variants are underclocked versions of the same GPUs designed.
2. the regular non Max-Q GPUs have received significant clock speed cuts compared to the desktop versions.
I have 11 FPS with my 1660 Ti Max-Q 6GB Memory. I think it’s normal because the performance of 1660 Ti Max-Q is less than the regular 1660 Ti.
You can compare it with your GPU (has 8GB memory), I guess you can have at least 15-16 FPS. If you want to have 35 FPS, you should run it on a Titan X (desktop version) that has 12GB memory. (again my opinion).
Hey!
Nice work.
Can you please suggest what should we change if we use thermal images as input?
Best tutorial i have seen so far.. sir kindly make a similar tutorial regarding the training of the yolo v3 on custom dataset and preparation of dataset. in image of darknet architecture i can count 52 convolutional layers kindly guide whether these are 52 or 53 conv layers..
Hi Rahmad Sadli, A nice article clearly explaining all details to a new learner.
I have a query, Is there a typo in “End Notes” which is showing “To facilitate the prediction across scale, YOLOv3 uses three different numbers of grid cell sizes (13×13), (28×28), and (52×52).”, Should this be (28×28) OR (26×26).
Thanks
(26×26) indeed,,Thanks..
Actually is very useful article
Note:
only modify the point-4 in “End-Notes” section the 2nd scale is (26 x 26 as you mentioned earlier) not (28 x 28)
(26×26) indeed,,Thanks..
How much number of input image give to identify if lung isdamage or ot with using yolov3?
Can you give me some resources to learn how to train this model please.
thank you
Very good and very useful
How can we replace alexnet as the feature extractor in yolov3
Say, you got a nice article.Really looking forward to read more. Keep writing.
Great tutorial. I am interested if I input an image 416×416 (with e.g. 3 objects on that), what will be my output of YoloV3 algorithm, (3, 85), so the 3 bounding boxes with each row bx, by, bh, bw, confidence score and then more 80 values as probabilities for the classes?